You have checked the range, you get the sensors communicating with a local receiver or with a network provider, and you finally get data readings across the network.
There will be 2 things that will come to mind straight after that:
- how do I know when the batteries are going to need replacing
- how do I know if a sensor stops transmitting (or the wireless line is interrupted)
In this article I am going to give you some information that answer these 2 questions.
How do I know when the batteries are going to need replacing
Battery level is present on all sensors in different forms. Let see how.
Wireless M-BUS
With Wireless M-BUS a Modbus point providing battery level information is visible in either the "Field Installation" software, under "Modbus Map", or extracting it from the same software in CSV format, like in the example below:
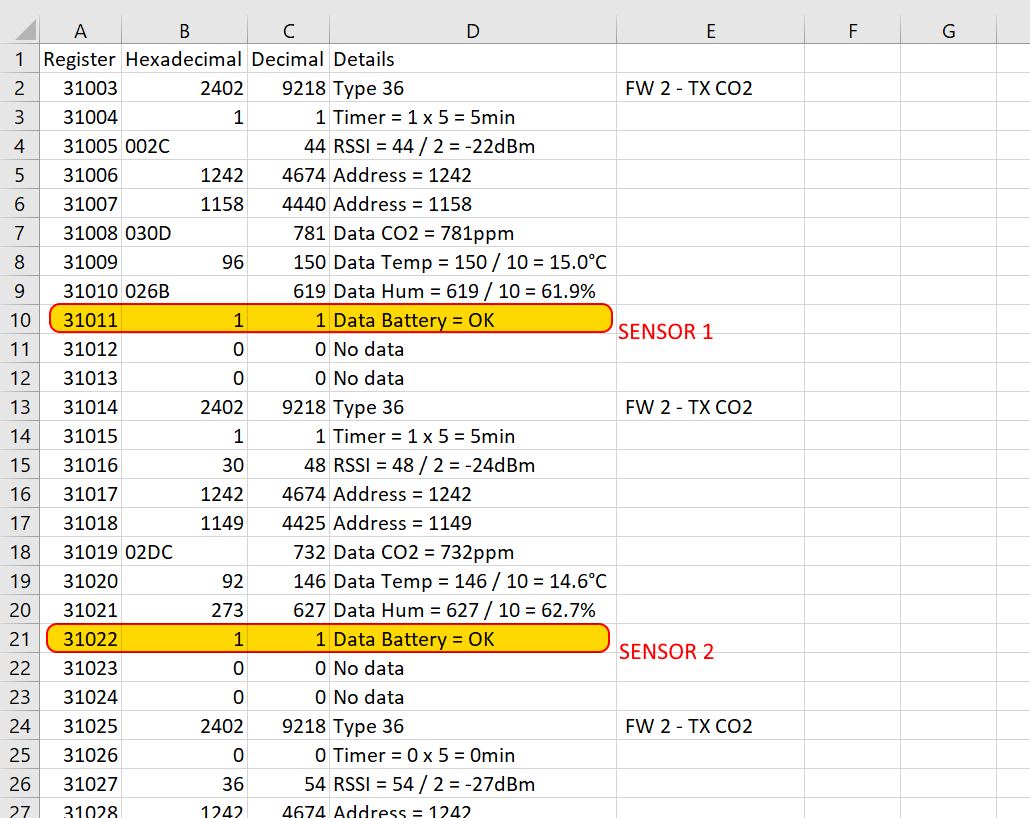
The battery level is expressed as a decimal value "1" when the battery is OK, and then with value "0" when the battery level is LOW, which corresponds to a battery voltage reading under 3 Volts.
If the battery goes flat and the sensor is lost, you can see how to detect it towards the end of this article.
LoRa (private, with Enless receiver)
With LoRa sensors used in private mode and going through an Enless receiver, you will get either a Modbus or a BACnet point providing the battery status (depending on the model of receiver used).
The point will be visible on the web server interface of the receiver, like you can see below for Modbus:
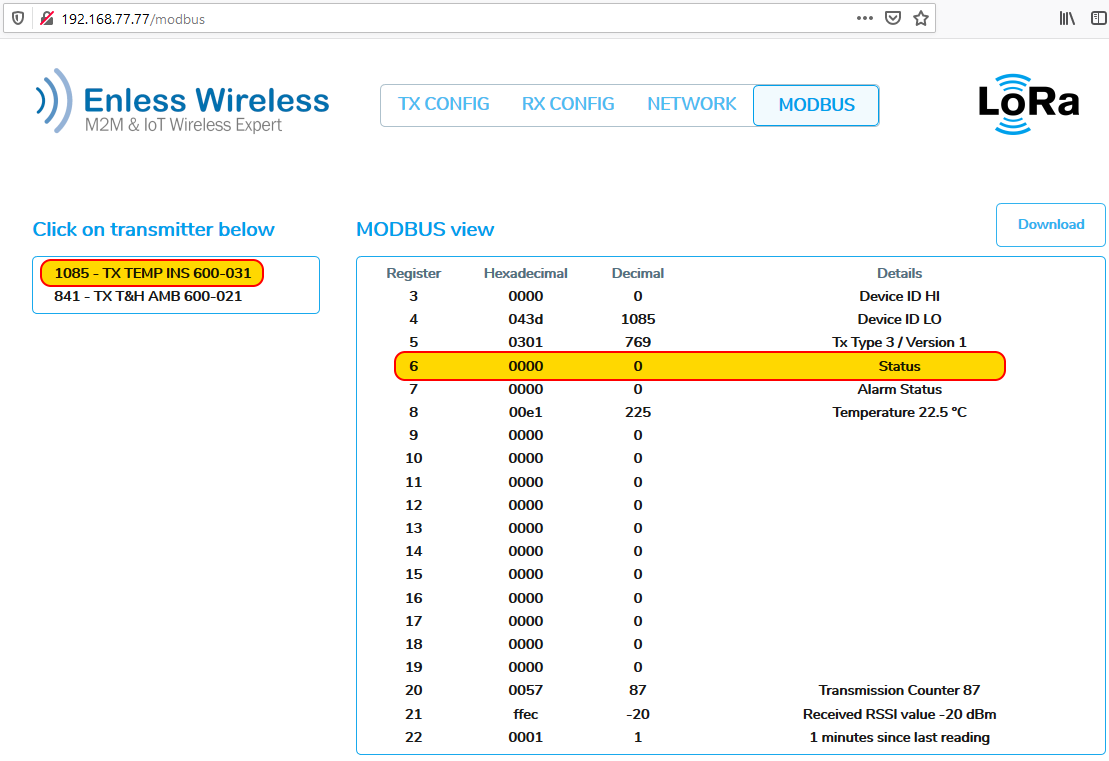
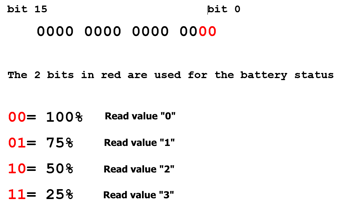
With Modbus, the point called "Status" provides a 16 bits information data where bit 2 and bit 3 are used to get the battery level (25%, 50%, 75% and 100%).
The bits are used in the following way:
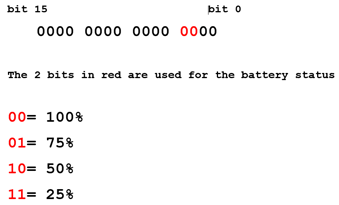
When using BACnet instead, a dedicated "Battery level" point is provided instead of the full status above
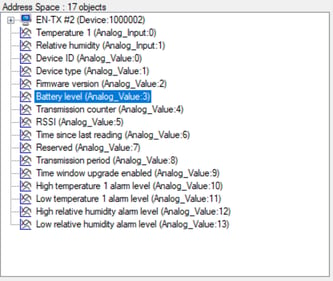
but it works the same, just using bit 0 and bit 1 instead
LoRa WAN (third party gateway or through network operator)
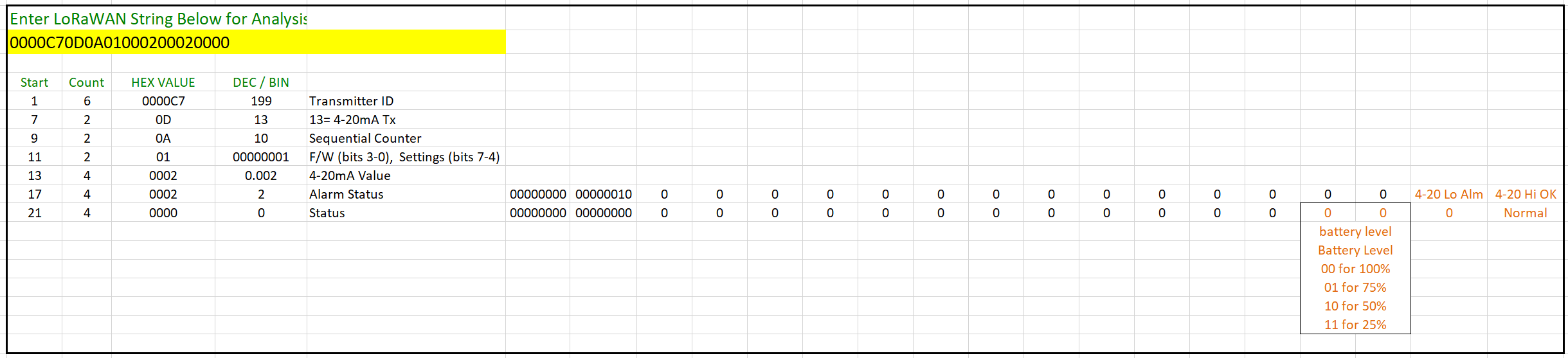
With LoRa sensors used in LoRa WAN configuration the battery status is available by decoding the data frame received. A file explaining how to decode every sensor is available on our support website HERE
As an example, see below how the battery level is decoded on a 600-035 transmitter:
Sigfox
With Sigfox sensors the battery status is available by decoding the data frame received. A pdf document explaining how to decode every sensor is available on our support website HERE
As an example, see below an extract from the pdf on how a temperature sensor battery level is decoded:
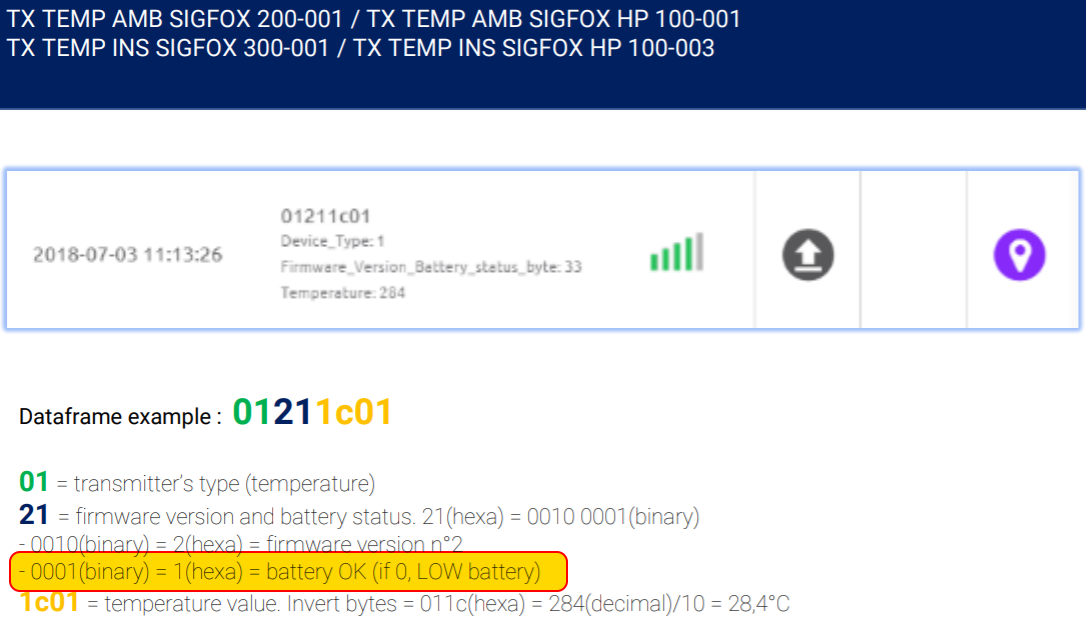
The battery level is expressed as value "1" when the battery is OK, and then with value "0" when the battery level is LOW, which corresponds to a battery voltage reading under 3 Volts.
How do I know if a sensor stops transmitting
With Sigfox and LoRa WAN (going through an operator) you will need to implement some checks on the backend to verify new data is coming across. We are not going to get into that as it is purely down to the cloud development.
But when using wireless M-BUS or LoRa (private mode using Enless receiver), the point list of each sensor that you get out of the receiver will provide you with a "timer" that counts the minutes passed since the last transmission received from that sensor.
On the BMS, it becomes easy to program a check on such point where if there hasn't been any transmission being received in the last hour (for example), then the sensor has to be offline for any reason.
With Wireless M-BUS such point would be visible in either the "Field Installation" software, under "Modbus Map", or extracting it from the same software in CSV format, like in the example below:
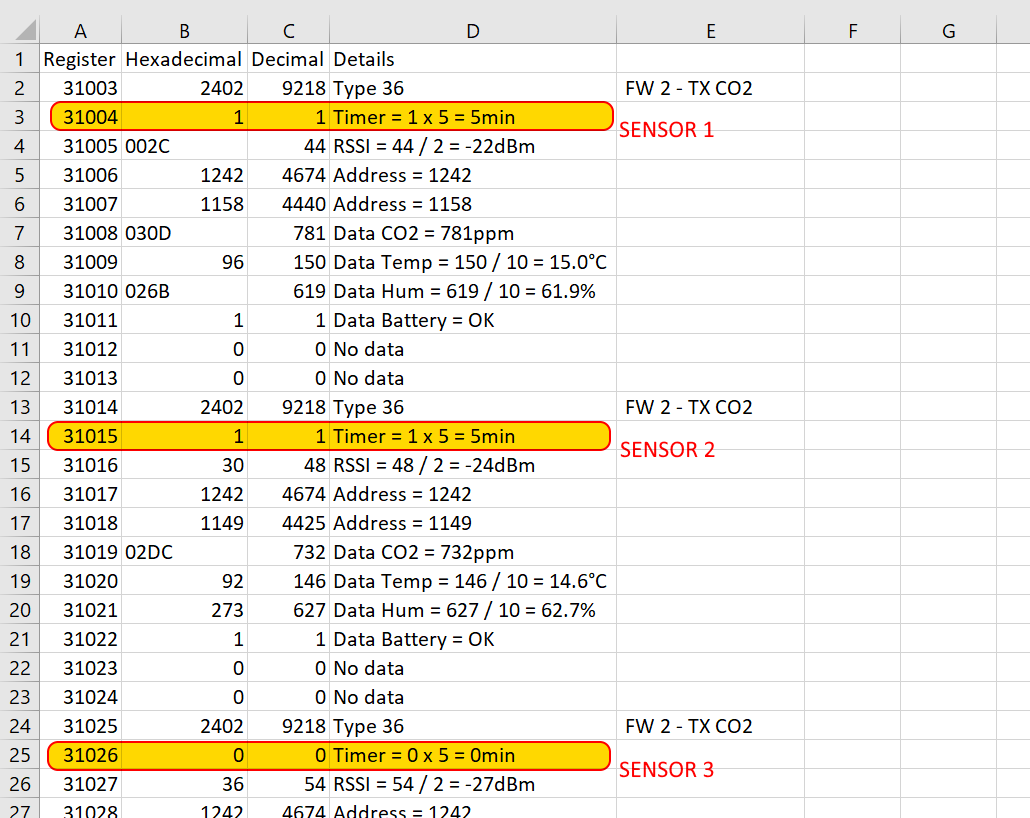
Note that the times increases by 1 unit every 5 minutes, so a 1 hour waiting without receiving any transmission would show value 12.
With LoRa instead, the counter is visible by connecting to the receiver web interface, see below:
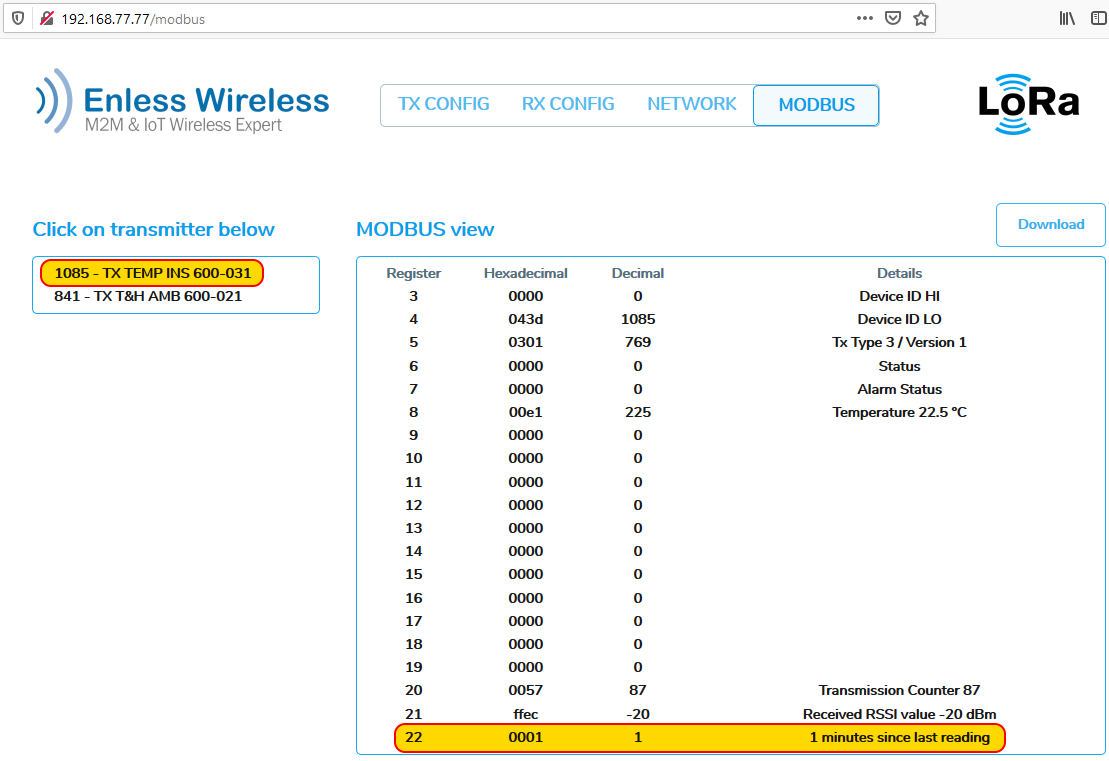
In this case the counter doesn't have any scaling and an increment of 1 unit corresponds to 1 minute counted